#include <uqAdf.h>
Definition at line 35 of file uqAdf.h.
◆ UQMeasurementSet() [1/3]
| xerus::UQMeasurementSet::UQMeasurementSet |
( |
| ) |
|
|
default |
◆ UQMeasurementSet() [2/3]
◆ UQMeasurementSet() [3/3]
◆ add()
| void xerus::UQMeasurementSet::add |
( |
const std::vector< double > & |
_rndvec, |
|
|
const Tensor & |
_solution |
|
) |
| |
◆ add_initial()
| void xerus::UQMeasurementSet::add_initial |
( |
const std::vector< double > & |
_rndvec, |
|
|
const Tensor & |
_solution |
|
) |
| |
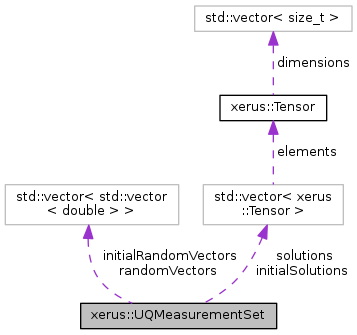
◆ initialRandomVectors
| std::vector<std::vector<double> > xerus::UQMeasurementSet::initialRandomVectors |
◆ initialSolutions
| std::vector<Tensor> xerus::UQMeasurementSet::initialSolutions |
◆ randomVectors
| std::vector<std::vector<double> > xerus::UQMeasurementSet::randomVectors |
◆ solutions
| std::vector<Tensor> xerus::UQMeasurementSet::solutions |
The documentation for this class was generated from the following files:
- /home/gitlab-runner/builds/9071116c/0/xerus/xerus/include/xerus/algorithms/uqAdf.h
- /home/gitlab-runner/builds/9071116c/0/xerus/xerus/src/xerus/algorithms/uqAdf.cpp